Today’s vehicles are as networked, if not more so, than our homes, offices, and factories. According to one estimate, the wiring harness for a multiplexed bus in a high-end luxury vehicle can weigh as much as 110 lbs. Hence the rise of standards for automotive networking such as automotive Ethernet.
“Automotive Ethernet” can refer to any Ethernet-based networking scheme for in-vehicle electrical systems. It also serves as an umbrella term for both BroadR-Reach (or OPEN Alliance BroadR-Reach) and 100Base-T1 (the IEEE’s 802.3bw-2015). In either case, automotive Ethernet is specifically tailored to enable faster data communication for in-vehicle networking.
What are some of the industry trends that have driven the development of automotive Ethernet? As mentioned above, there’s the near-doubling of the amount of electronics within vehicles over the last decade or so. That doubling pertains to complexity as well as volume. Vehicles now routinely contain multiple cameras, on-board diagnostics, advanced driver assistance systems (ADAS), infotainment systems, and in-dash displays. With all of that hardware and software comes huge demand for bandwidth.
Along with high bandwidth, today’s vehicles are best served by networks with an open architecture that’s scalable, future-proof, and can support multiple systems and devices. An in-vehicle network shouldn’t impede getting the product to market. Cabling should be cost-effective and relatively lightweight. In addition, in-vehicle networks must meet tough industry standards with respect to temperature range, power consumption, and reliability.
Many of the requirements sketched out above are beyond 100/1000Base-T, which has seen very limited use in automotive environments. That Ethernet variant is best suited for enterprise, business, and consumer applications. It offers a much longer reach, and is a shielded, four-pair cable that is too heavy for the automotive market.
Indeed, some specific challenges drove requirements for automotive Ethernet. For one, the operating environment is rather harsh, with temperatures ranging from -40°C to 85°C in the vehicle body and to 125°C in the chassis and power train. Mechanical constraints include acceleration of up to 4G in the body and cabin. Mechanical robustness is a must; we don’t want cable connections failing every time we hit a pothole.
BroadR-Reach
The BroadR-Reach variant of automotive Ethernet, which was pioneered by Broadcom, leverages standard Ethernet technology but adapts it for use in automotive applications. It is capable of 100 Mb/s (Figure 1) over unshielded twisted-pair cabling with a reach of up to 15 meters (or up to 40 meters with shielded twisted pair).
BroadR-Reach can be thought of as a hybrid of the 100Base-T and 1000Base-T protocols. The OPEN (One-Pair Ether-Net) Alliance, which oversees the BroadR-Reach specification, adopted the best aspects of both protocols and stressed those characteristics that make both suited for automotive networking applications.
The 1000Base-T (Gigabit Ethernet) signal is a PAM-5 signal, which means there are five signal levels, while the 100Base-T signal is a PAM-3, three-level signal. BroadR-Reach went with the three-level scheme. Both 1000Base-T and 100Base-T have data rates of 125 Msymbols/s, whereas BroadR-Reach’s data rate is 66.67 Msymbols/s. Bandwidth is reduced by a factor of 2X, which enables the protocol to accommodate lower-quality and lower-cost cabling while also permitting filtering that’s required to meet stringent automotive signal-integrity needs. Additionally, BroadR-Reach operates full-duplex in emulation of 1000Base-T, but uses only a single twisted pair of wires.
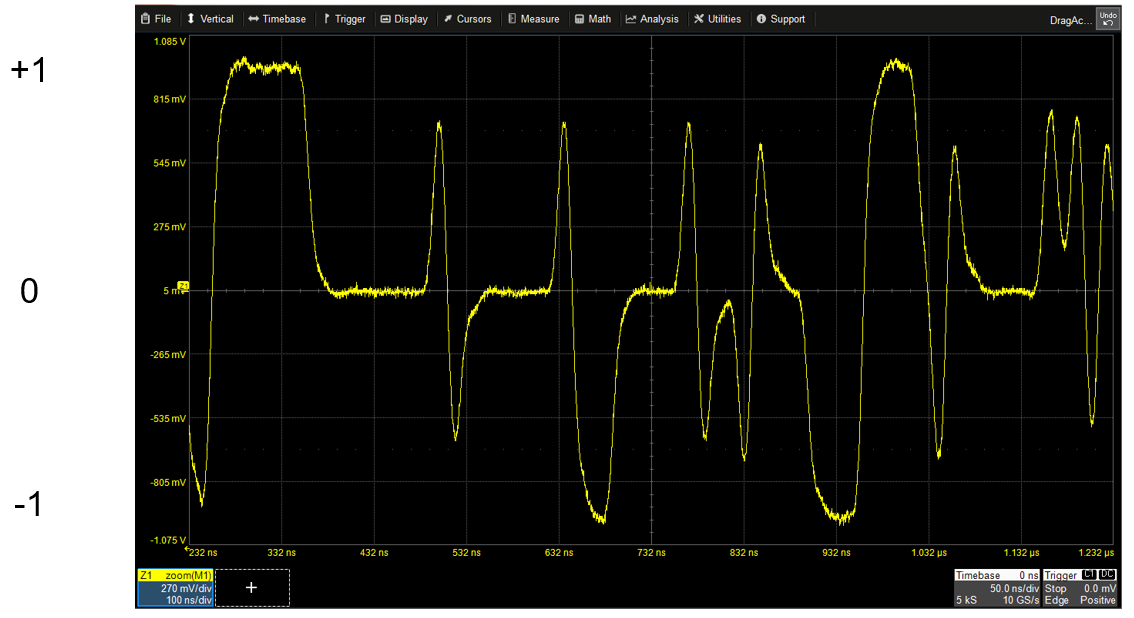
In Figure 2, we see an example of PAM-3 signaling as it might look for a BroadR-Reach signal. Note that the +1 peaks have varying amplitudes, which is a result of settling time. The first peak on the left of the screen capture comprises some four or five +1 bits in succession, so it has reached full amplitude, while the next +1 peak, a single bit, has not.
Benefits of Automotive Ethernet
Let’s consider some of the benefits of using automotive Ethernet, while comparing it to other protocols that see usage in the automotive environment. Automotive Ethernet provides higher bandwidth data transmissions compared with LIN (19.2 kb/s), CAN FD (15 Mb/s), FlexRay (10 Mb/s), and MOST (25, 50, or 150 Mb/s shared). The LIN protocol really only sees usage for very low-bandwidth applications controlling body electronics such as windows or lights.
CAN and/or CAN FD offers a flexible data rate in the 15-Mb/s range but still is limited to relatively low-bandwidth applications. The same is true of FlexRay, which does offer the advantage of redundancy with its pair of parallel data lines. If one line is damaged, the other can take over its function. Thus, it has applications in safety or mission-critical functions such as steering or braking control.
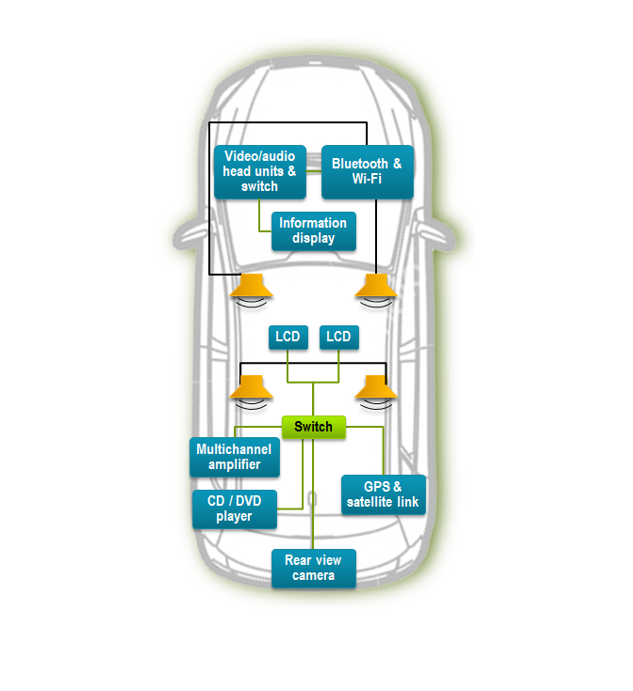
Media-Oriented Systems Transport (MOST) is an infotainment standard with data-rate variants of 25, 50, and 150 Mb/s. The latter is a higher aggregate bandwidth than the 100 Mb/s of automotive Ethernet. But a key distinction is that MOST’s 150 Mb/s is shared across the ring-topology network, while each dedicated automotive Ethernet link provides the full 150-Mb/s bandwidth (Figure 1).
Thus, Automotive Ethernet offers higher bandwidth than do most of the prevalent automotive serial-data standards. Being that it relies on a single unshielded twisted pair, it also provides a low-cost cabling scheme. Cabling weight is about 30% less than shielded cabling with connectivity cost savings of about 80%.
Automotive Ethernet meets the stringent EMC and EMI requirements as well as the temperature-grade requirements of the automotive application space. A final benefit is that all of the software interfaces for the upper layers of the Ethernet stack are exactly the same as for standard Ethernet. If you’ve ever worked with Ethernet in the past, you’ll probably already have all of the software and test tools covered.
BroadR-Reach vs. 100Base-T1
Both BroadR-Reach and 100Base-T1 are explicitly intended for automotive use and there’s quite a bit of overlap between them. Let’s look a little more closely at BroadR-Reach applications and also explain the differences between it and 100Base-T1.
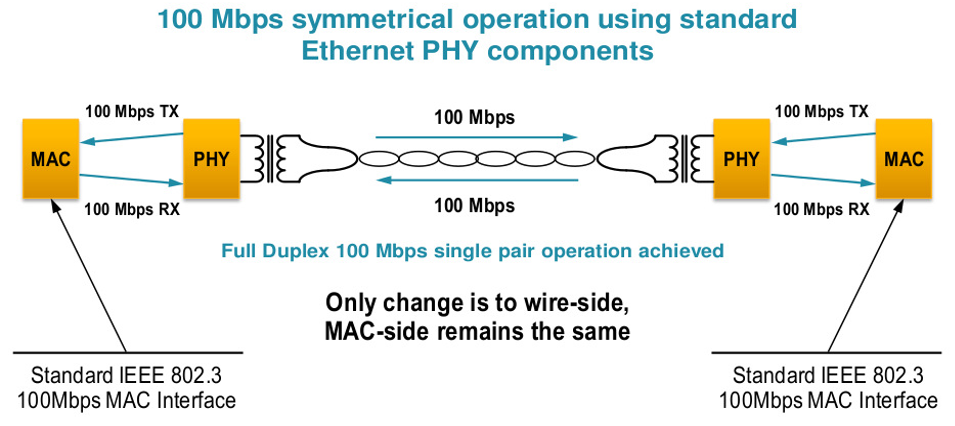
The configuration of a BroadR-Reach link (Figure 3) shows that the protocol offers full-duplex operation at a data rate of 100 Mb/s over a simple twisted pair of wires. At both ends of the link are BroadR-Reach PHY chips that send and receive data in both directions at once. Going above the PHY chips to the MAC interface level, we find plain-vanilla IEEE 802.3 Ethernet. Thus, the only difference between BroadR-Reach and ordinary Ethernet is from PHY to PHY. At the upper levels of the Ethernet stack, the topology is identical to that of 802.3.
What are some prominent applications for BroadR-Reach? One is ADAS, which can be implemented in passive or active fashion. A passive ADAS system only provides drivers with a warning or alert if, for example, they stray outside of their lane. In contrast, an active ADAS goes beyond a warning, taking control to perform a corrective action (returning the vehicle to its lane or performing automated emergency braking). Another passive ADAS application is backup cameras; an active ADAS provides parking assistance.
At 100 Mb/s, BroadR-Reach is best suited for passive ADAS applications. Active ADAS requires lossless video so that image-recognition algorithms can function appropriately. For example, if the vehicle is trying to recognize potential hazards in the near distance, the algorithms will focus more accurately with full lossless video input.
Another popular application for BroadR-Reach is infotainment. BroadR-Reach is more cost-effective than MOST or low-voltage differential signaling (LVDS). Much of the cost savings is in the cabling. LVDS cables are quite thick, so that means higher cost as well as more weight. LVDS was used often with analog cameras connected with coaxial cables. With the move to digital cameras, BroadR-Reach offers the benefits of the twisted-pair cable and higher bandwidth.
100Base-T1 is the IEEE’s specification for 100-Mb/s automotive Ethernet. You might see it referred to as IEEE 802.3bw, but both names address the same specification. The “-T1” appendage is an important distinction that lets you know the name refers to automotive Ethernet, which is distinct from 100Base-T.
The -T1 variant is interoperable with OPEN Alliance BroadR-Reach. They are very nearly identical (the names are often used interchangeably), but for two small exceptions. In the physical-layer electrical (physical medium attachment or PMA) test suite, the 100Base-T1 specification defines a test for the maximum Transmit Peak Differential Output. This parameter is not explicitly defined in the BroadR-Reach specification.
The second exception is that the 100Base-T1 specification has some differences in the protocol timing for wake-up commands to make those periods shorter. But those are the only differences worth noting.
Why, then, one wonders, did the IEEE 802.3bw specification come about? The driver wants applications for automotive Ethernet in other application domains, such as industrial automation and avionics. The benefits of BroadR-Reach were enticing enough for the IEEE to create its own version of the specification. As a result, the two automotive Ethernet specifications share a common environment and ecosystem.
