A conventional AM broadcast generally begins in the studio as a music or voice audio signal. The audio signal modulates the amplitude of a radio-frequency electrical signal. This AM signal–also referred to as double-sideband amplitude modulation to distinguish it from single-sideband modulation–produces equal frequency sidebands on either side of the center frequency. In single-sideband modulation bandpass filters eliminate one of the sidebands in order to improve bandwidth usage.
AM is widely used in modern broadcasting as well as in computer modems. It is not suitable for music and high-fidelity programming because the receiver amplifies noise and EMI in direct proportion to the received signal.
For a variety of reasons, AM is also not suitable for data transmission. Perhaps the most notable drawback is the amount of spectrum the ordinary AM signal occupies. When viewed in the frequency domain, a modulating frequency, f, produces sidebands sitting at ±f on either side of the carrier frequency, c, i.e. at c + f and at c – f. These sidebands are relatively close to the carrier for ordinary audio. But consider the sidebands that would arise for AM frequencies common to modern data communications, which can be in the gigabit-per-second range. The sidebands would extend for hundreds of Megahertz and more on both sides of the carrier. Use of this much spectrum for one signal is considered impractical for today’s RF environment. Moreover, such a broad-spectrum signal would be susceptible to interference anywhere in the frequency range occupied by the sidebands.
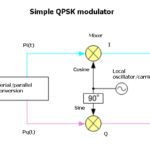
Consequently, the AM used for digital data communications is a special type called quadrature AM, or QAM. QAM uses two carriers having an identical frequency but which are 90° out of phase with each other. Thus QAM is a combination of phase and amplitude modulation. The mathematics that explain the advantages of QAM get to be quite involved. The point of the technique is to squeeze the modulated signal into a much smaller bandwidth than would be possible using ordinary AM.

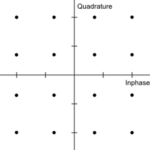
Typical measurements of QAM signals involve what’s called a constellation diagram depicting the data carried via the two QAM carriers. The two signals are known as the in-phase (I) and quadrature (Q) components. At each data clock transition, the carrier occupies any one of several specific locations on the I versus Q plane. Each location encodes a specific data symbol, which consists of one or more data bits.
The number of digital QAM states is 2N, as determined by the number of binary bits N per symbol. Thus a 16-QAM system (N = 4) is one for which the carrier is modulated into any one of 16 different amplitude and phase states, while the carrier of a 64-QAM system (N = 6) has 64 different amplitude and phase states. QAM circuit complexity and constraints increase drastically with the level of the QAM code.
On the well-known constellation display, the state of the I carrier is typically put on the X axis, the state of the Q carrier on the Y axis. The constellation points are usually arranged in a square grid with equal vertical and horizontal spacing, although other configurations are possible. Thus the instantaneous state of the two carriers determine what data bit is sent or received.
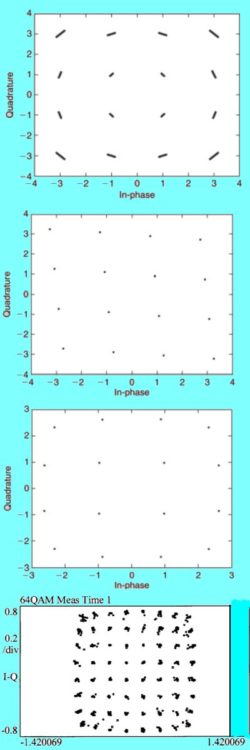
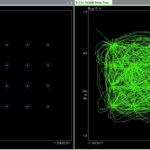
A perfect QAM signal will have a uniform constellation that is perfectly symmetric about the origin. In real systems, these points may not be as precise as the ideal plot–they can be blurry or not positioned at exactly the right points. These distortions can be caused by factors such as phase noise, I/Q imbalance in the quadrature modulation, CW interference, dc offset, or nonlinearities in the transmitter’s final power amplifier.
The way to analyze such problems is through use of vector signal analyzers that perform time, frequency, and modulation domain analyses. These instruments process signals in full vector (magnitude and phase) form. The also can make what are called error vector magnitude, or EVM, figure-of-merit measurements that quantify QAM signal quality.
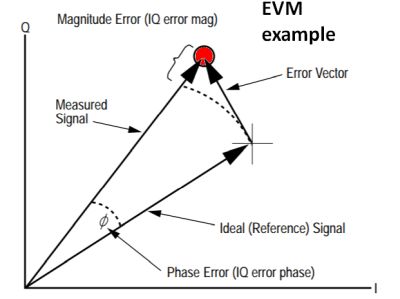
At any moment in time, the QAM signal’s magnitude and phase can be measured. Simultaneously, a corresponding ideal or “reference” phasor can be calculated, given knowledge of the transmitted
data stream, the symbol clock timing, baseband filtering parameters, and so forth. The differences
between these two phasors form the basis for the EVM measurements.
EVM is the residual noise and distortion remaining after an ideal version of the signal has been stripped away. By convention, EVM is reported as a percentage of the peak signal level, usually defined by the constellation’s corner states. The angle measured between the actual and ideal phasors (I-Q phase error) contains information useful in troubleshooting signal problems. Likewise, I-Q magnitude error shows the magnitude difference between the actual and ideal signals.
 Some vector signal analyzers can run the sequence of steps that comprise an EVM measurement automatically. What happens internally is that, following a/d conversion of the incoming signal, a demodulator recovers everything from the carrier and data-symbol clock locking to baseband filtering from the transmitted bitstream. The recovered data bits are next used to create the ideal reference version of the input signal. Taking the calculated reference waveform and the actual incoming waveform (both now existing as blocks of digital samples), the two need only be subtracted to obtain the error vector values.
Some vector signal analyzers can run the sequence of steps that comprise an EVM measurement automatically. What happens internally is that, following a/d conversion of the incoming signal, a demodulator recovers everything from the carrier and data-symbol clock locking to baseband filtering from the transmitted bitstream. The recovered data bits are next used to create the ideal reference version of the input signal. Taking the calculated reference waveform and the actual incoming waveform (both now existing as blocks of digital samples), the two need only be subtracted to obtain the error vector values.
Different error mechanisms will affect a signal in different ways, perhaps in magnitude only, phase only, or both simultaneously. Knowing the relative amounts of each type of error can help confirm or rule out certain types of problems. Thus, the first diagnostic step is to resolve EVM into its magnitude and phase error components and compare their relative sizes. When the average phase error (in degrees) exceeds the average magnitude error (in percent) by a factor of about five or more, the likely culprit is some sort of unwanted phase modulation. Causes include noise, spurs, or cross-coupling problems in the frequency reference, phase-locked loops, or other frequency-generating stages.
Residual AM is evidenced by magnitude errors that are significantly larger than the phase angle errors. In many cases, the magnitude and phase errors will be roughly equal. This indicates a broad category of other potential problems.