
Radial flux AC motors offer some performance and packaging benefits but also bring some thermal and manufacturability issues. Part 1 of this series examined the axial-flux motor (AFM) in detail and compared it to the very widely used radial-flux motor (RFM). Part 2 of this FAQ continued the exploration of AFMs and RFMs. This final part […]
Motor and Motion Control
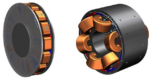
FAQ on axial flux motors: Part 2

Radial flux AC motors offer some performance and packaging benefits but also bring some thermal and manufacturability issues. This part of the FAQ continues the exploration of AFMs and RFMs. The first part examined the axial-flux motor (AFM) in more detail and compared it to the very widely used radial-flux motor (RFM). The final part […]
FAQ on axial flux motors: Part 1
Radial flux AC motors offer some performance and packaging benefits but also bring some thermal and manufacturability issues. For many electrical and even mechanical engineers, motor selection is somewhat of a mysterious process. You can understand their basic principles and operation. Still, the real-world design considerations of their flux paths, poles, materials, and tradeoffs seems […]
AmberSemi showcases power products with ST embedded solutions

At APEC 2024, the companies will showcase reference designs for brushless motors jointly developed using AmberSemi’s AC Direct DC Enabler Power Conversion Technology and ST’s STM32 MCU devices. Amber Semiconductor, Inc. announced a reference design for brushless motor applications using AmberSemi’s breakthrough AC-to-DC conversion semiconductor system to power ST’s STM32 microcontrollers. This reference design will […]
FAQ on servo motors: part 2

The servo motor is an older precise-positioning motor arrangement now facing some competition from the stepper motor. Part 1 of this article introduced the concept of servo motors along with servo amplifiers and servo controllers. This part continues that exploration. Q: What’s the history of servo motors? A: There were purely mechanical, closed-loop servo systems […]
FAQ on servo motors: part 1

The servomotor is an older precise-positioning motor arrangement now facing some competition from the stepper motor. When engineers need precise positioning of a motor’s shaft (rotor) angle and associated mechanical system, their first thought in many cases may be to use a stepper motor (aka “stepper”). That makes sense, as stepper motors have the attributes […]
Compact, DC slotless motors achieves speeds up to 60K rpm

Portescap introduces the 08ECP20 brushless DC slotless motor, a mini actuation solution ideal for engineers looking to downsize devices and applications without compromising on performance or reliability. The 08ECP20 is the smallest frame size to join Portescap’s Ultra EC portfolio. This 8mm motor incorporates Portescap’s proprietary Ultra EC winding and an optimized bearing assembly, a […]
How to choose and test an electric motor: Part 1

Motors bridge electronics with electromechanical devices. To learn how to test motors and their electronics, you should first understand how motors work. Electric motors are ubiquitous, appearing in everything from electric toothbrushes to electric locomotives. There are, however, seemingly almost as many motor types and configurations as there are applications, which makes choosing and testing […]
MCU controls two motors for use in A/C, e-bikes

Nuvoton Technology launched its KM1M4BF series MCU and KM1M7AF/KM1M7BF series MCUs designed for motor and power control in wide-ranging consumer, enterprise, and industrial applications, such as air conditioning, heat pumps, white goods, tools, e-bikes, EV charging, solar inverters, energy storage, and power supplies. The new MCU series is designed to improve energy efficiency beyond current […]
FAQ on traction motors, part 3

Traction motors are optimized for locomotives, EVs, elevators, and other situations where high torque at start-up and low speed is needed. The final part of this article examines additional traction-motor issues. Q: What about physical size and associated issues in traction-motor applications? A: Inner-city urban light-rail vehicle (LRV) floors are typically low since the stops […]
