Automotive OEMs are racing to grab a share of the fast-evolving autonomous vehicle (AV) market, estimated to represent a $7 trillion economic opportunity by 2050. But as this race becomes crowded with more entrants and even more feature-rich technology, the industry is also trading ambitious marketing claims and releasing schedules for caution to ensure the safety of systems they develop before mass deployment.
These OEMs need the means to rapidly design and exhaustively test the many nested systems in an autonomous vehicle, from ICs to ECUs, and E/E networks to overall vehicle design, which ultimately entails bridging electrical and mechanical domains.
Validating these systems via traditional methods requires many years of testing in every environmental condition imaginable. According to the findings of a report issued by the Rand Corporation, AV prototypes would have to be driven hundreds of millions of miles, and in some cases hundreds of billions of miles, over the course of several decades to demonstrate their reliability in terms of fatalities and injuries—an outcome the authors deemed inconsistent with the near-term commercial viability of self-driving cars. For possible solutions to these challenges, researchers pointed to innovative testing methods such as advanced simulation technologies.
What’s needed is a virtual solution. More specifically, a “digital twin” of each critical system, with simulated tests for each of them individually and as an integrated whole—before building and testing them in the physical world. In fact, automotive engineers and system designers are increasingly turning to digital simulation technologies, including physics-based digital twin models, to realize significant time, cost, and reliability advantages over traditional verification and validation (V&V) approaches.
Let’s examine the essential elements of a system-level approach to verifying and validating the key electronic systems comprising first-generation passenger vehicles powered by automated driving (AD) technology, with a focus on advanced simulation technologies.
Challenges in Sensor Modeling
Self-driving cars will require a broad spectrum of sensors to serve as their eyes and ears. Today, a regular vehicle (non-autonomous, with perhaps a handful of driver-assist features) has anywhere from 60 to 100 onboard sensors, and that number will only increase as cars get “smarter.” Perhaps that is why BCC Research predicts that the global market for automotive sensors will reach $43.3 billion by 2021, up from $26.3 billion in 2016.
Among these sensors, three types stand out as must-haves for autonomous driving—lidar (light detection and ranging), radar, and image cameras (Figure 1).
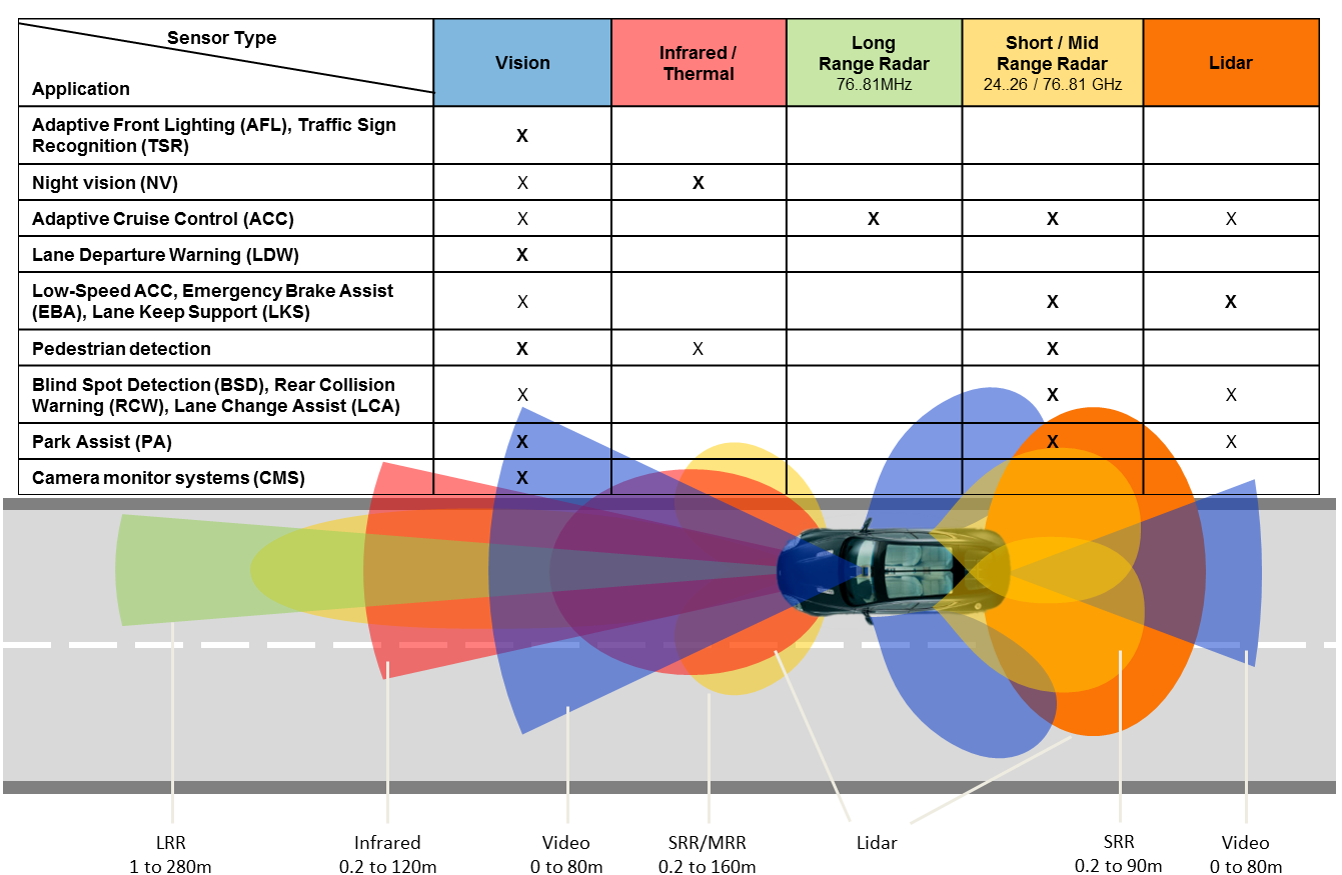
No single type of sensor can fulfill all functionality requirements in all weather and light conditions. Therefore, most companies are pursuing a combination of these sensors to create a 360-degree view around the vehicle. Lidar uses light in the form of a pulsed laser to measure ranges with extreme accuracy. Radar is used for the detection and tracking of objects—for example, understanding the velocity and direction of the car, as well as the range to angle of objects. And while radar doesn’t provide the granularity of lidar, it works well in adverse weather conditions.
Design goals for developing automotive lidar systems, radars, and cameras largely center on reducing size and cost, without sacrificing resolution and range requirements necessary to support various levels of vehicle autonomy. Additionally, when integrated, these sensors must function reliably in an automotive environment, which includes dependable performance in all weather conditions. With vision sensors integrating cameras, heat buildup can cause pixel darkening resulting in poor image quality. Likewise, the increased signal processing requirements of multifunction electronics can increase operating temperatures and further erode power consumption. These design objectives can result in wasted energy in the form of heat, which can detrimentally impact sensor performance and reliability.
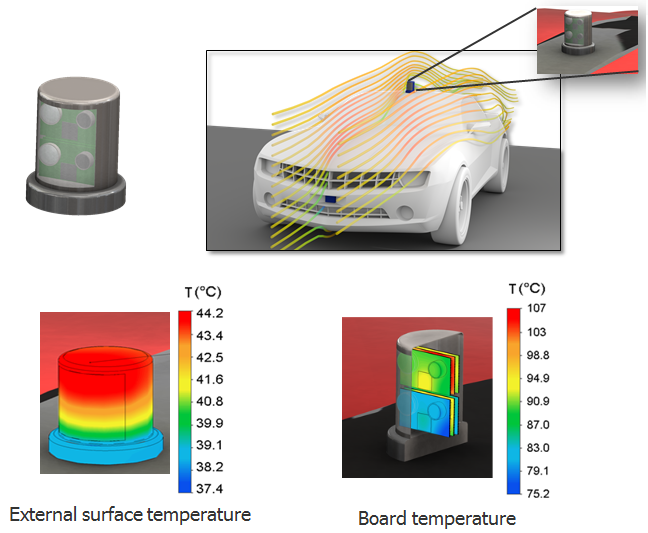
Estimating the thermal behavior of a sensor before it is manufactured, can help hardware engineers to achieve the desired size (and therefore cost) reduction. Undertaking a thermally conscious design for sensor electronics and their enclosures, while taking into account their vehicle integration locations, achieves the desired form factor and cost reductions without jeopardizing sensor life due to undesired hot spots.
Figure 2 shows the advantages of reliable thermal simulation of AV lidar sensing design, accounting for its vehicle integration location from an early stage of design/prototyping.
Due to the criticality of AV sensor operation, sensor electronics designers must also address signal integrity. Hence, electromagnetic interference is also a significant challenge for radar design.
Efficient EV Design in the Autonomous Drive Era
While some engineers are tasked with the design of specific sensor models, others are assigned the broader task of designing first-generation self-driving cars from a “system of systems” perspective. And since the vast majority of self-driving cars will feature electrified powertrains, these engineers must design for optimal thermal efficiency throughout the vehicle to simultaneously address a range of interdependent requirements. Autonomous drive functionality must execute safely, including sensor fusion boxes and a broad array of sensors. The precise and correct thermal design of these sensors and other AD systems is vital to ensuring safe autonomous drive functionality. However, the thermal and power loads of the vehicle’s high-performance AD systems can reduce electric drive range by as much as 35 percent. Similarly, in-cabin passenger comfort requirements and machine driving behavior can significantly affect the vehicle’s electric powertrain energy efficiency and drive range.
Managing these interdependent requirements necessitates optimization of the thermal design for all onboard AD electronics—from ICs and vehicle integration, to electric powertrain and cabin design. To meet this challenge, a new category has emerged that is designed to help reduce cost and time penalties associated with physical prototyping and extensive testing. These software-based platforms feature capabilities including co-simulation of all onboard thermal and electric components, and provide insight into powertrain thermal performance. They also enable interior/passenger design space exploration using thermal digital twin models of possible approaches to HVAC design. This type of solution features seamless connectivity to electronic design automation tools and CAD design platforms, helping engineers easily account for design co-dependencies across electronic, electrical, and mechanical domains from the earliest stages of development.
Using these tools, mainstream automotive engineers can generate highly accurate thermal digital twin simulations of the powertrain, processors, sensors, and other key enabling technologies powering autonomous EV designs. With this system-wide view, engineers can focus on analyzing the many design trade-offs and engineering considerations associated with self-driving cars.
As previously mentioned, all of these sensor technologies are needed to enable autonomous driving. But testing the sensors and the broader designs that they power, in the context of the real-world driving scenarios in which they are deployed, presents another category of V&V challenges.
Simulated Driving Technology Speeds V&V
As mentioned earlier, relying solely on physical testing to validate and verify the safety of self-driving cars to navigate the full range of driving situations and “edge-cases” would require driving billions of test-miles. Even then, ethics would preclude physically testing many of the most dangerous driving scenarios. But AD engineers are increasingly turning to simulated driving/traffic technologies, which enable engineers to quickly and safely simulate a vast array of driving scenarios in just a few hours.
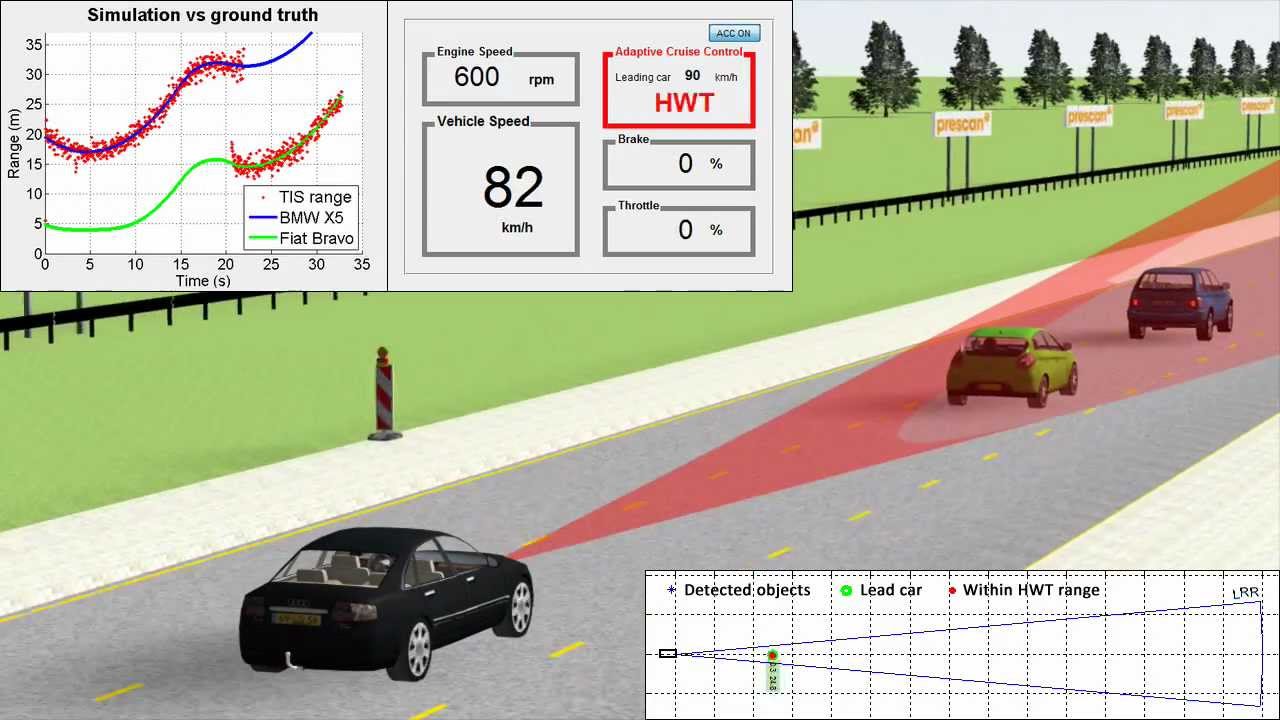
In contrast to real-world circumstances, conditions in such simulation environments can always be perfectly quantified and fully controlled. Design iterations can be performed in a quick and cost-effective way by simply modifying the system’s parameters and running the simulations again. Simulators enable AD designers to greatly reduce the amount of work needed to successfully put an AD system onto the market. They help deliver an improved initial design in the concept phase, faster optimization in the development phase, and a faster launch in the confirmation phase.
Today’s state-of-the-art driving/traffic simulation platforms deliver accurate visualization and flexible scenario definition. They can also generate lidar, radar, and camera sensor data based on simulated scenarios. This sensor data can then be fed into the car’s central AD engine, where it can be fused in real time to create a high-resolution model of the vehicle’s environment and driving conditions, against which the AD engine’s algorithms for drive/decision policies can be tested and refined.
Simulation technologies are also ideal for designing and evaluating vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication applications, as well as autonomous driving applications. Additionally, they can be used from model-based controller design (MIL) to real-time tests with software-in-the-loop (SIL) and hardware-in-the-loop (HIL) systems.
Tying it All Together and Testing it
All onboard AD sensor systems must communicate with one another, and must be connected with the rest of the automobile’s electrical system. The systems and wires connecting them compose the wire harness, which adds substantial weight to a vehicle (impacting performance and fuel efficiency).
Included in the harness are special vehicle buses that serve as communication networks for specific subsystems such as the powertrain, sensor networks, and infotainment. Common communication networks include the Controller Area Network (CAN), Local Interconnect Network (LIN), and Automotive Ethernet. E/E system design tradeoffs must be evaluated early in the development process to help deal with complexity and optimize the overall design. Vehicle functions are growing more interconnected, which adds complexity to already highly distributed networks. Network load balancing must be considered as fault tolerance issues grow more critical.
Needless to say, the entire harness must be built, and also tested extensively for flawless communications and electrical connectivity. For these tasks, automotive engineers often rely on architecture, communication, and connectivity tools that help speed the design process, reduce product cost, and improve product quality.
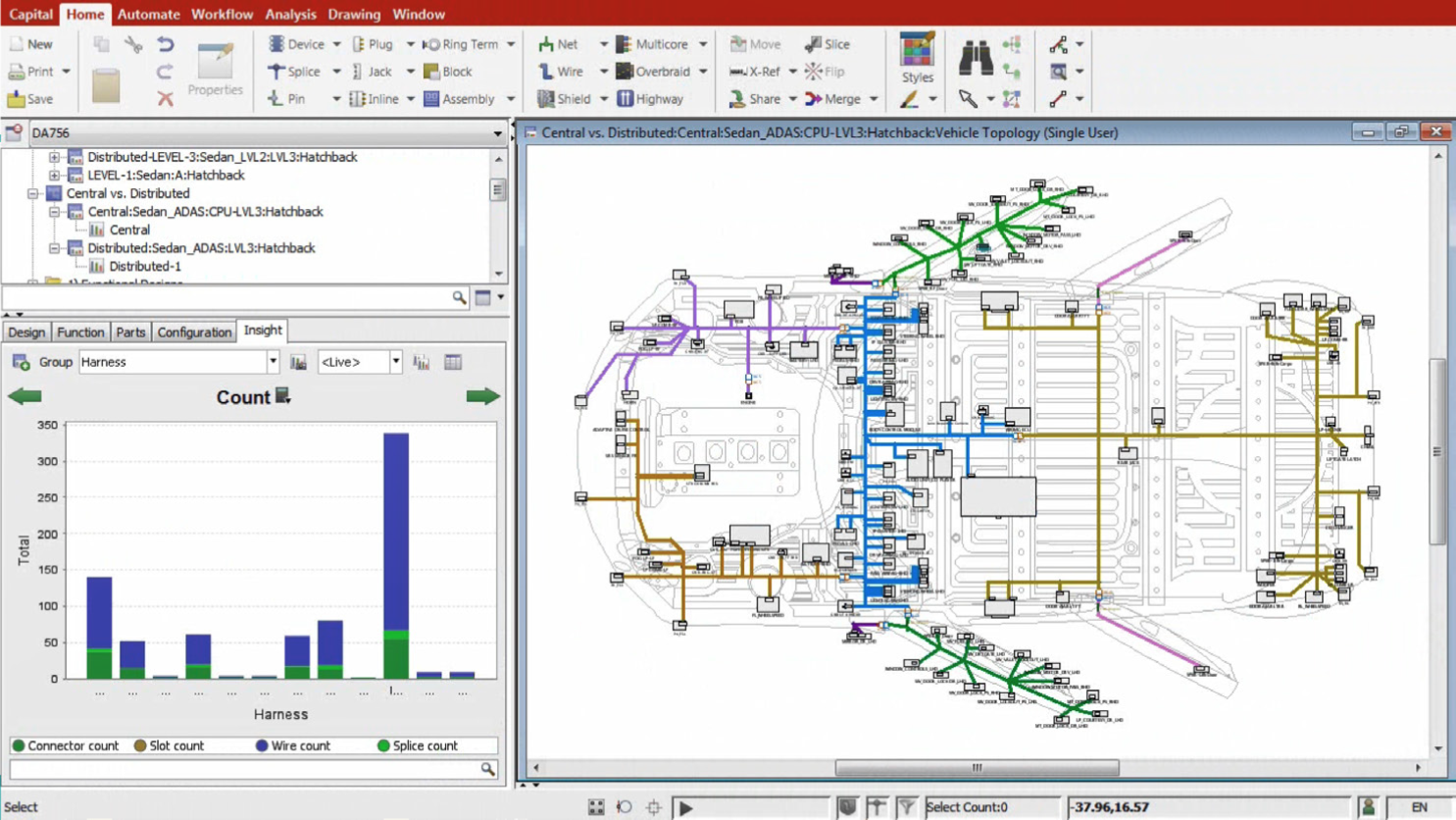
Such tools can define system architectures, and then, using built-in metrics and design rule checks, compare and contrast multiple potential architectures to ensure the platform design meets the original intent. The tool can then automatically integrate the electrical systems into a representative topological layout of that vehicle. Devices and systems devices are automatically placed and interconnected, and the entire wiring system is automatically generated using rules and constraints embedded by the company into the software.
The result is that design tasks that previously took months can now be achieved in hours or days, and, critically, the designs can be verified as they are created. Data can be reused across vehicle programs and in the downstream processes of manufacturing and service.
Digital twin technology and other advanced simulation continues to keep pace with the rapidly changing autonomous driving space, supporting the system of systems approach necessary to test advanced components, systems—and indeed, entire vehicles—and then test these components and systems in software-based simulations before moving to production. Simply put, this enables AD engineers to be smarter and more efficient in developing AVs, and ultimately, safely move to the mass deployment of Level 4/5 vehicles that are ahead of the competition.
