Cozmo is a palm-sized robot from San Francisco-based Anki, the same company that makes an intelligent racing robot system called Overdrive that we’ve torn down previously.

Cozmo is actually an earlier version of an Anki robot called Vector. Vector has more capabilities in the area of artificial intelligence, thanks to its use of a processor that’s normally used to power smartphones. In contrast, Cosmo has a more basic main processor. So a lot of the computations that Cozmo makes actually happen in the cloud, thanks to a cellphone app that communicates with Cozmo and with Anki servers.
One of the intriguing aspects of Cozmo is what’s called a gamification system that lets you unlock more games as you complete more activities with. There’s also a remote-control mode where you can display on your smartphone what Cozmo sees through his camera while he roams around.
Cozmo has been built to interact with its users and has a small display screen that, in conjunction with audio effects, can be used to mimic human emotional responses. Anki even hired a former Pixar animator to help give Cozmo the feeling of an animated film character. The robot emits a diverse series of emotive chirps when someone is around, which it senses with its built-in camera. The result is a WALL-E-inspired personality that makes Cosmo seem more like a pet than a toy robot.
Cozmo’s built-in camera also lets it remember faces and recite names. It comes with three cubes that carry sensors and lighting that are used in various games and also let Cozmo plan paths.

Anki obviously put a lot of thought into the mechanics of Cosmo. The robot disassembles pretty readily because Cosmo just uses ordinary Philips screws, no special screwdrivers required. We start by flipping Cozmo over to reveal the infrared light and sensor on the bottom surface of his body that is used for detecting objects. The first step in disassembling Cozmo is to take his tracks off. That allows you to see that it is Cosmo’s bigger front wheels that are driven. The rear wheels just turn on their axles. Taking off Cozmo’s hubcaps exposes the screws holding on his wheels. Removing the wheels reveals a gear that engages with teeth on the inner diameter of the rear wheel and the screws holding the body together.
There’s a top piece that pops off the body to reveal the underside of the pushbutton assembly. Cozmo’s head is comprised of his display screen and camera that tilt up and down in one plane. A red fascia on the side of the rotating ‘head’ display hides the screws that hold the head enclosure together. Removing the screws that hold the ‘head’ together allows you to remove the two pieces of the plastic head enclosure as well as the tinted front screen, revealing the display and camera.

The display is actually what’s called an in-plane switching LCD panel. This is considered a high-performance display because it has a wider viewing angle than the older twisted nematic LCDs. Cozmo’s speaker is on the back of his head assembly. Removing the speaker lets us see the gear used to rotate the head up and down. Also visible is the PCB comprising the head electronics to which mount the display and camera. Evident as well is the axle for the head rotation. Once you have the head removed, you can see a third last screw that holds the main body together.
To get Cozmo’s body apart, you have to remove the two arms on his lift mechanism. There are two pieces to the front scoop on Cozmo with a rubber lip on the bottom of the scoop that acts as a cushion. The small arms are passive and just snap onto an axle in the body. One of the large arms is also passive. It snaps into a circular socket and rotates. The other large arm is the drive arm.
When you finally get the arms off Cozmo the two halves of his body finally come apart. Then you can see there are two ballast weights in the base that probably come into play when Cozmo does wheelie tricks.
Finally, we remove the cover of the body holding the main drive motors and their drive train. We see that the drivetrain consists of three speed-reducing gears. We also see what appear to be two magnetic encoders mounted on the shafts of the motors. These are how the motor controller keeps track of the motor speed. Cozmo runs in what’s called tank mode – the two motors steer the robot by making the speed of one wheel different than the other.
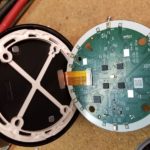
That brings us to the electronics. We’ll start with the circuit board that holds the display screen. There’s a metal shield covering the main chip, a Wi-Fi SoC from Chinese chip maker Espressif, and the Winbond flash chip from which it boots up. We looked for a Wi-Fi antenna on this board, but we didn’t see one, though it’s possible it could reside beneath the LCD on the flip side of the board. It’s also possible the wires used to connect the display board to the main board somehow double as antennas.

There’s a second chip on the board that is the brains of Cozmo. It is a Kinetis K02 microcontroller from NXP. It includes a 100 MHz ARM Cortex-M4 processor that includes some embedded flash and RAM. The rest of the electronics resides on the main PCB that does double duty as the mounting frame for the drive motors and gearbox. The main IC we find there is a Nordic Bluetooth low-energy chip.
This device is built to do more than just handle Bluetooth transmissions. It includes a PWM and quadrature demodulator that are available for use by peripherals. So the Nordic chip almost certainly handles the motor controls necessary to move and steer Cozmo. That idea is reinforced by the fact that we didn’t find a separate motor controller IC.

The rest of circuitry on the main PCB consists of eight surface-mount devices which look as though they are drive transistors, and another small IC whose markings are ambiguous, but which seems to be there to manage the battery charging.
Each of the motors have what seem to be a magnetic encoder on the motor shaft. So we can gather from that the controller implements velocity feedback control on each motor. And there are two lobes on each of the two magnetic encoders, which would seem to mean that the controller can resolve the movement of the motor shaft down to one half of one shaft rotation. Given that we found three stages of velocity reduction in the gearbox, that would give plenty of control over Cozmo’s speed and steering.
Finally, we can turn to the three smart cubes that come with Cozmo. Each cube has four translucent pieces that cover LEDs which flash and actuate for various games. The LEDs sit on a circuit board that also holds a terminal for the removable battery in the cube. To get at the circuit board, you detach one side of the cube as though you are changing the battery. The middle section unscrews to reveal the battery spring and an antenna for the wireless Bluetooth circuit, both mounted to the back of the cube’s circuit board.

Then the circuit board just lifts out to reveal the LEDs and Bluetooth chip mounted to the other side. The chip is also from Nordic. It is a specialized version of a Bluetooth chip often used in wireless mice.

There’s no spec sheet publicly available for this chip so we can’t say much more about it. What’s also interesting is that we were expecting find some kind of vibration sensor on the cube. That’s because some of the games you can play with Cozmo involve bashing a cube after it lights up. We found one IC that has ambiguous markings that could be an accelerometer. Also, it’s mounted exactly in the middle of the circuit board, which would be a strategic location for an acceleration sensor. So though we couldn’t identify who made the chip, we’re pretty sure it is, in fact, an accelerometer.
And that’s about it for Cozmo the robot, a predecessor to Vector.





Leave a Reply
You must be logged in to post a comment.