A microbot built at Purdue University’s School of Mechanical Engineering moves by tumbling, guided by a magnetic field. The researchers chose magnets for their “microscale magnetic tumbling robot,” called microTUM, because they enable it to travel through dry and wet environments. The ability to move around in wet environments makes it suitable for drug delivery, a likely application in the medical field.
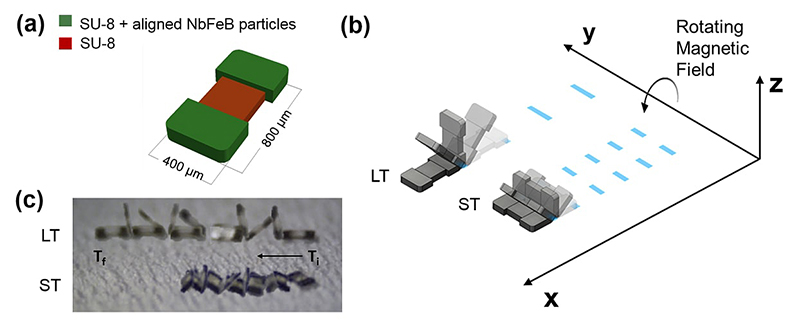
The robot consists of a non-magnetic center cargo segment and two magnetic ends. A magnetic field rotating constantly around it causes it to flip, propelling it along.
“Unlike the microTUM, other microscale robots use a rocking motion under an alternating magnetic field, where contact between the robot and the surface is continually lost and regained,” said postgraduate student Chenghao Bi, one of the authors of the paper. “Though the continuously rotating field used for the μTUM is harder to implement than an alternating field, the trade-off is that the tumbling robot always has a point in contact with the ground, provided that there are no sharp drop-offs or cliffs in its path. This sustained contact means that the μTUM design can take advantage of the constant adhesion and frictional forces between itself and the surface below it to climb steep inclined terrains.”