The Biomechanics and Motor Control research unit of the Department of Movement and Sports Sciences of Ghent University performs research on human gait assistance by means of ankle-foot exoskeletons. In 2013 their project became one of the first to augment human walking. Since then, they improved the exoskeletons’ assistance properties, which lead to an increase in walking efficiency of about 12 percent compared to walking with normal shoes, ranking it amongst the best in the world.
In parallel, scientists from Carnegie Mellon University have developed a method to overcome the biggest challenge in the design of human exoskeletons and prostheses: what should the device do in order to provide optimal assistance? The novel approach applied a wide range of exoskeleton behaviors while the user walked on a treadmill. The user’s energy consumption was measured and used to optimize multiple parameters controlling the exoskeleton’s behavior. This resulted in a user-specific exoskeleton behavior that reduced the energy consumption to a greater extent than any prior device. Whereas earlier methods made it practically impossible to optimize more than two control parameters, the new approach applies an evolution-inspired algorithm, enabling the optimization of multiple control parameters in a short time period. Furthermore, the exposure to a wide range of exoskeleton behaviors facilitates the user’s motor learning, which is also crucial to the success of this approach.
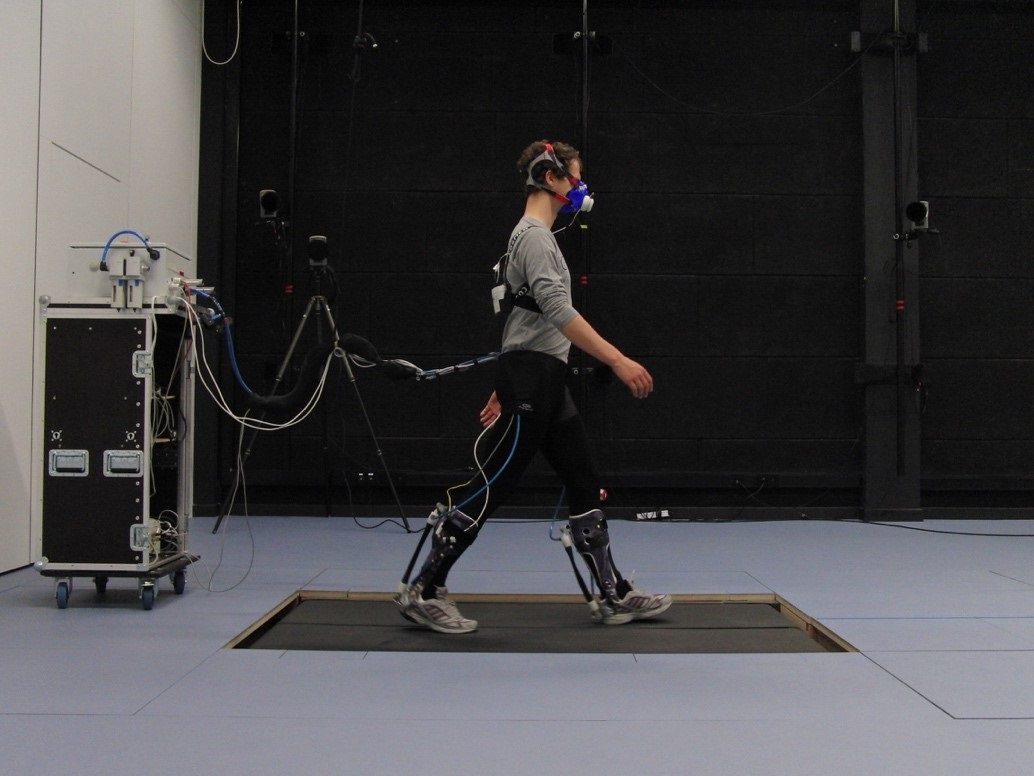
In the accompanying Science perspective letter, scientists of Ghent University and the University of Nebraska elaborate on the user’s motor learning. They state that variable practice leads to better motor skills in sports, physical therapy and professional settings but that it never has been thoroughly implemented in the context of exoskeletons and prostheses before. Whereas exoskeleton and prosthesis research is typically conducted under very stable circumstances in a lab context, variable practice more accurate replicates the experience of walking in daily life, since it happens on uneven terrain and consists of constantly changing walking speeds. Given the results of the first application of variable practice and the successes in other fields, it is expected that a huge progression can be made by focusing upon different training modalities in which the user learns to walk with his exoskeletons or prostheses.
Recently, one of the co-authors of the Science paper rejoined the Department of Movement and Sports Sciences of Ghent University to incorporate this new approach in the ongoing exoskeleton research. One of their projects aims to improve the walking performance of patients with reduced exercise capacity by implementing exoskeleton walking sessions in their rehabilitation.
This new approach, together with more attention to the human inside the exoskeleton or prosthesis, could have a transformative effect on the field, enabling improved designs and practices leading to exceptional improvements in mobility for users with diverse physiological needs.
For more information: https://science.sciencemag.org/cgi/doi/10.1126/science.aan5367
