A new disaster relief robot is on the loose, named Centauro. Created by researchers from IIT-Istituto Italiano di Tecnologia, it resembles the shape of a centaur with a four-legged base and human-like torso.
The design exists under the Centaruo project, which aims to assist in emergency response situations in dangerous, hostile locations. With this in mind, the designers chose body dimensions that could fit within human infrastructure, such as corridors, stairs, and doorways.
The 93-kg (205-lb) design stands 1.5 m tall (4.9 ft), sporting a shoulder width of 65 cm (2.1 ft). Its aluminum, magnesium, and titanium alloys are built to handle harsh interactions, high strength manipulation, and robust locomotion. In order to accomplish all these tasks, Centauro draws power from a battery that can operate for 2.5-hour stretches.
To achieve articulated movements, the robot’s legs have six degrees of freedom, and it can rotate and extend its hips, knees, and ankles. The ankles are also home to the wheel modules. Made from an aluminum alloy coated with an outer layer of over-molded elastomer material, the wheels add rolling to its mobility arsenal in addition to articulated locomotion.
Centauro has the ability to transition from a quadruped robot stance, to a spider leg configuration for added stability when manipulating tools. Its arms, which weigh about 10.5 kg (23.1 lb), carry a payload capacity of 11 kg (24.2 lb). Thanks to the impact resilient actuation system, the robot can perform tasks without damaging its internal components.
A series of sensors come together to form the robot’s perception system. Specifically, it utilizes cameras, RGBD sensors, and a lidar scanner. The joints themselves are also home to high fidelity torque sensing, and thermal state monitoring sensors.
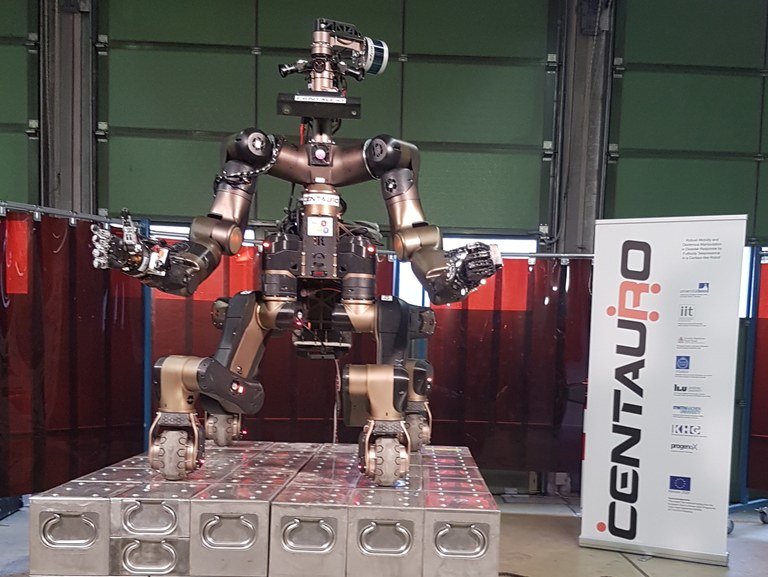
Before Centauro charges into unsafe environments, take a look at its design in the image below.