As radio-access networks change from a single unit into a distributed system, which will also impact how networks keep time. Precision Time Protocol will distribute timing information, keeping the units synchronized in time and phase.
Network timing has always been a critical component of wireless services. With its higher data rates and low latency, 5G will need more reliable timing than did older technologies. In addition, there’s a movement to open the Radio Access Network (RAN) to allow more flexibility in network architectures. The opening and virtualizing of network functions bring with them a need for new timing architectures.
 In networks, timing requirements are often stated as an “absolute” measure, meaning the timing must be traceable to a known source. For phase/time applications, this traceable source is typically a satellite constellation. The first iteration of a satellite constellation used for time was the Global Positioning Satellite System (GPS). Designed primarily for navigation, GPS provides three-dimensional positioning data, longitude, latitude, and height. To achieve high levels of spatial positioning accuracy, satellites must be synchronized to an extremely accurate timing source and be able to regenerate that timing accuracy.
In networks, timing requirements are often stated as an “absolute” measure, meaning the timing must be traceable to a known source. For phase/time applications, this traceable source is typically a satellite constellation. The first iteration of a satellite constellation used for time was the Global Positioning Satellite System (GPS). Designed primarily for navigation, GPS provides three-dimensional positioning data, longitude, latitude, and height. To achieve high levels of spatial positioning accuracy, satellites must be synchronized to an extremely accurate timing source and be able to regenerate that timing accuracy.
With well-engineered GPS timing receiver technology, GPS users can recover accurate timing from the synchronized atomic clocks onboard GPS satellites. This coordinated timing lets adjacent receivers align to the same time reference. The space-based atomic clocks of the GPS system are synchronized by the U.S. Naval Observatory (USNO). USNO makes continuous measurements with the Bureau International des Poids et Measures (BIPM), the standards organization responsible for worldwide timekeeping, to ensure a time coordinated with the rest of the world, called Universal Coordinated Time (UTC). While GPS, developed and maintained by the US Department of Defense, was the first position, navigation, and timing (PNT) satellite constellation to be deployed, there are now several Global Navigation Satellite System (GNSS) technologies deployed worldwide for PNT. Examples of other GNSS systems are Galileo (EU), Glonass (Russia), Beidou (China), QZSS (Japan) and IRNSS (India).
As wireless technologies have moved successively through different technology iterations from 2G to 5G, network timing architectures have evolved in parallel. The 2G/3G Distributed RAN used GPS timing receivers integrated in macro cell sites have moved to a more centralized and/or center-weighted model where GPS is a network-based clock source for timing distribution.
Timing architectures have developed in three distinct phases. In phase 1, physical or packet-layer timing was engineered for frequency networks. GPS was deployed locally at the Distributed RAN (DRAN) base station tower for TDD (phase) applications. Phase 2 saw the addition of more centralized GPS sources, with timing delivered over packet to “pools” of baseband units (BBU).
Phases 1 and 2 rely on proprietary timing links from the BBU to the radios. Phase 3 will extend timing-over-packet protocols directly into the Radio Units, without proprietary timing and with less requirement for GPS at the DRAN base stations. With the introduction of Open RAN concepts in 5G, the BBU functions are classified as Centralized (CU) and Distribution (DU). These functions will evolve to virtualized, server-based functions that won’t be included in the timing path.
A Distributed GPS timing architecture based on Precision Time Protocol (PTP)–the telecom version of the IEEE 1588 timing over Ethernet Protocol–relies uses a combination of GNSS Receiver and PTP Grandmaster Clock. The most prevalent issue related to timing in wireless communications is co-channel radio interference. The deployment of a GPS receiver at a cell site–when the GPS receiver is tracking satellites properly–allows for the proper time slot transmission assignment. That in turn prevents radios that operate in frequencies adjacent to or close to each other from causing interference. In a radio cluster with overlapping coverage, a GPS receiver that fails or stops tracking properly will cause the radio connected to the GPS receiver to interfere with adjacent radios as the timing degrades or accumulates phase error. The timing degradation occurs very quickly because the radios use low cost, low performance oscillators (one of the radio design objectives is cost reduction by using lower specification components).
To avoid interference caused by degrading, the radio must either be removed from service or the services affected by the timing degradation must immediately turn off. To mitigate this type of failure scenario, a network can use a PTP network-based timing service, where the radios in the cluster are synchronized to a PTP grandmaster clock with an integrated GPS receiver. If either the GPS in the PTP grandmaster clock fails or has tracking issues, the radios synchronized to the grandmaster clock will remain phase aligned relative to the adjacent radios, thus eliminating interference. High quality oscillators deployed in the PTP grandmaster clock can maintain time alignment to UTC for extended periods. Plus, there are PTP-based backup scenarios that can be included in the architecture to help maintain UTC traceable time in failure scenarios. The PTP grandmaster clock network-based timing services approach is a very resilient and cost effective approach that provides the additional benefits of phase alignment of radio clusters in GPS failure scenarios, and bringing GNSS deployment to centralized points of presence where security and good line-of-sight to the Satellite constellation can be carefully engineered.
Figure 1 shows a distributed GPS with Integrated GPS timing receivers at macro cell sites for CPRI timing applications. The timing source is a GPS receiver integrated into the BBU and is co-located with the Radio Head (RH), usually at the base of the cell site. Timing is recovered from the GPS receiver by the BBU and transferred to the RH over a few meters of fiber using the Common Public Radio Interface (CPRI).
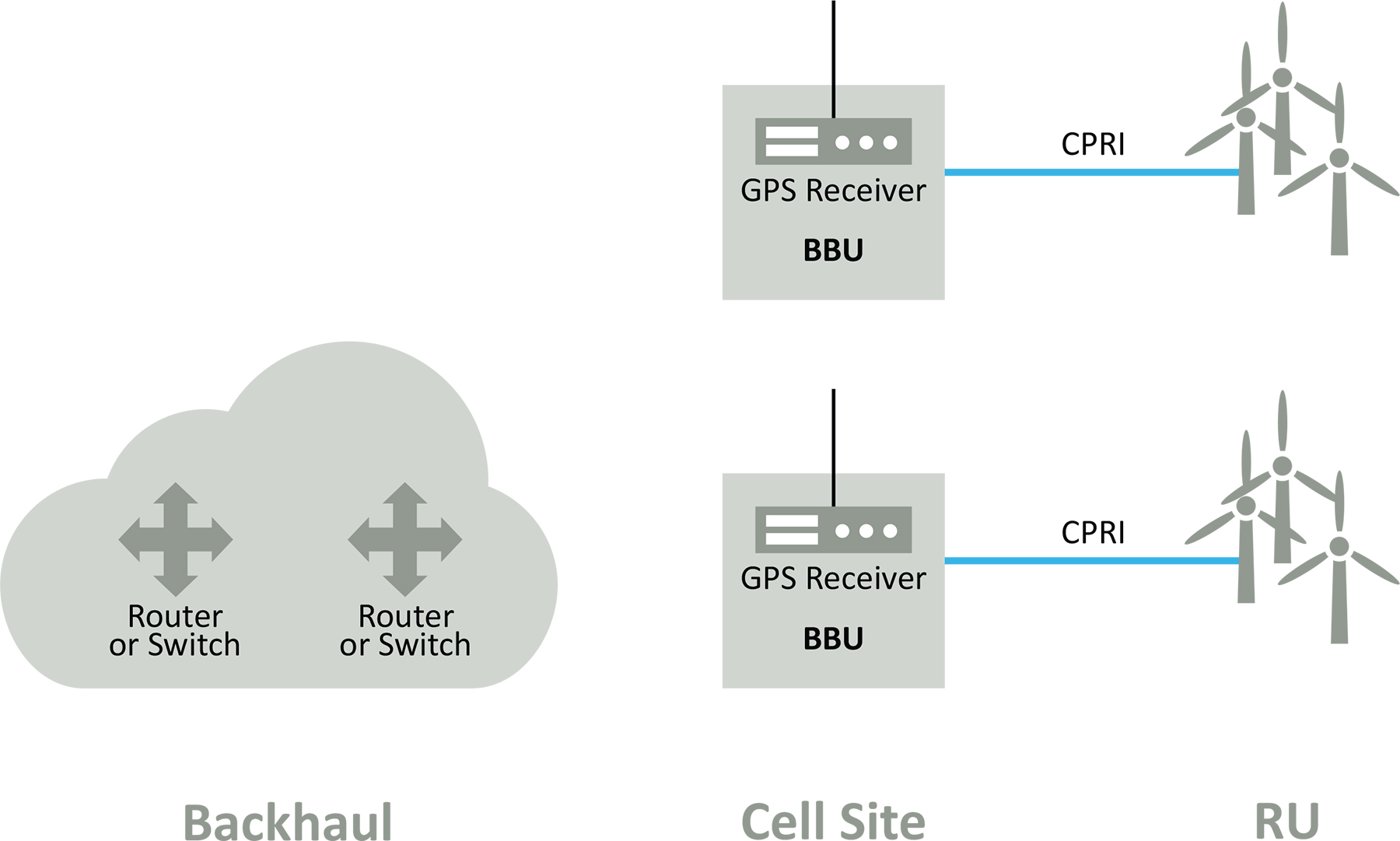
Figure 1. The distributed GPS timing architecture in a DRAN architecture shows a GPS Timing receiver integrated into the BBU. The timing is delivered from the BBU to the radio over the CPRI link.
In Figure 2, a GPS source network-based timing services uses PTP grandmaster clocks at radio cluster aggregation points for CPRI timing applications. In this application, the BBU is remote from the RH. BBUs are typically “pooled” at hubs known as Centralized RAN (cRAN) locations that are aggregation points for RH clusters. The source of time can be a GPS receiver located at the cRAN HUB with the GPS signal plumbed from the antenna to the receivers integrated into the BBUs, or alternatively, the GPS receiver can be combined with a PTP grandmaster clock, in which case a PTP timing service is delivered to PTP slaves in the BBU. Once the BBU has recovered the timing from the PTP flow or the GPS receiver, it then transfers the timing over the CPRI link to the Remote Radio Heads (RRH). The CPRI link in 3G and 4G service architectures has a distance limitation of approximately 17 km.
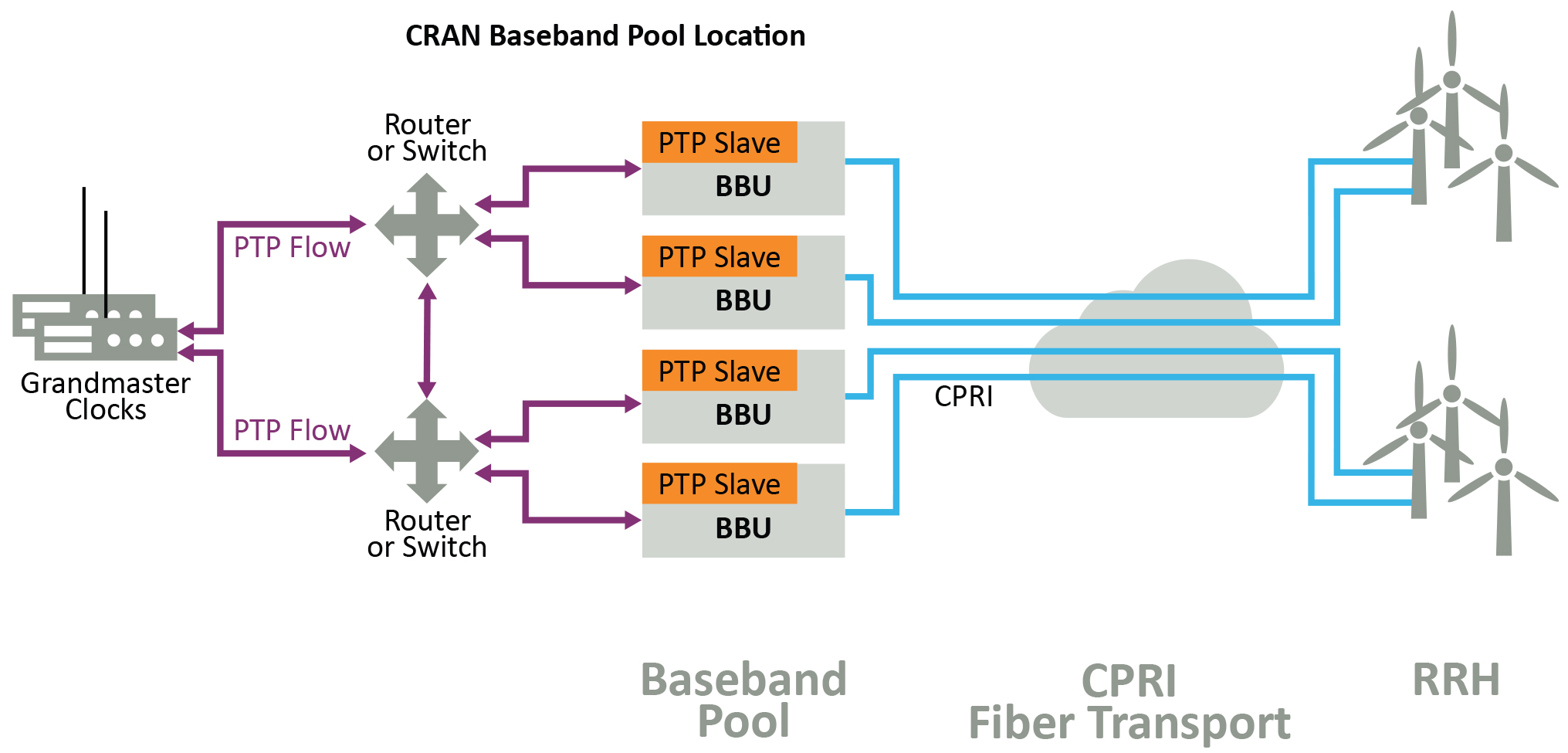
Figure 2. A PTP grandmaster PTP becomes the source of network-based timing for a radio cluster that transfers time from a PTP slave in the BBU to the radio cluster over the CPRI link.
5G services will increasingly depend on Precision Time Protocol (PTP) for resiliency and deterministic timing throughout the network. As Open RAN architectures gain momentum and are adopted for 5G deployments, the PTP timing flows will be terminated in the 5G radios and the DU is no longer required to be part of the timing chain form the Grandmaster Clock to the 5G radio.
5G will require radio densification and additional lower and higher frequencies than 4G, both of which need more carefully engineered timing to avoid increased co-channel interference between the Radios. Figure 3 shows GPS source network-based timing services where PTP grandmaster clocks at radio cluster aggregation points for Ethernet timing applications.
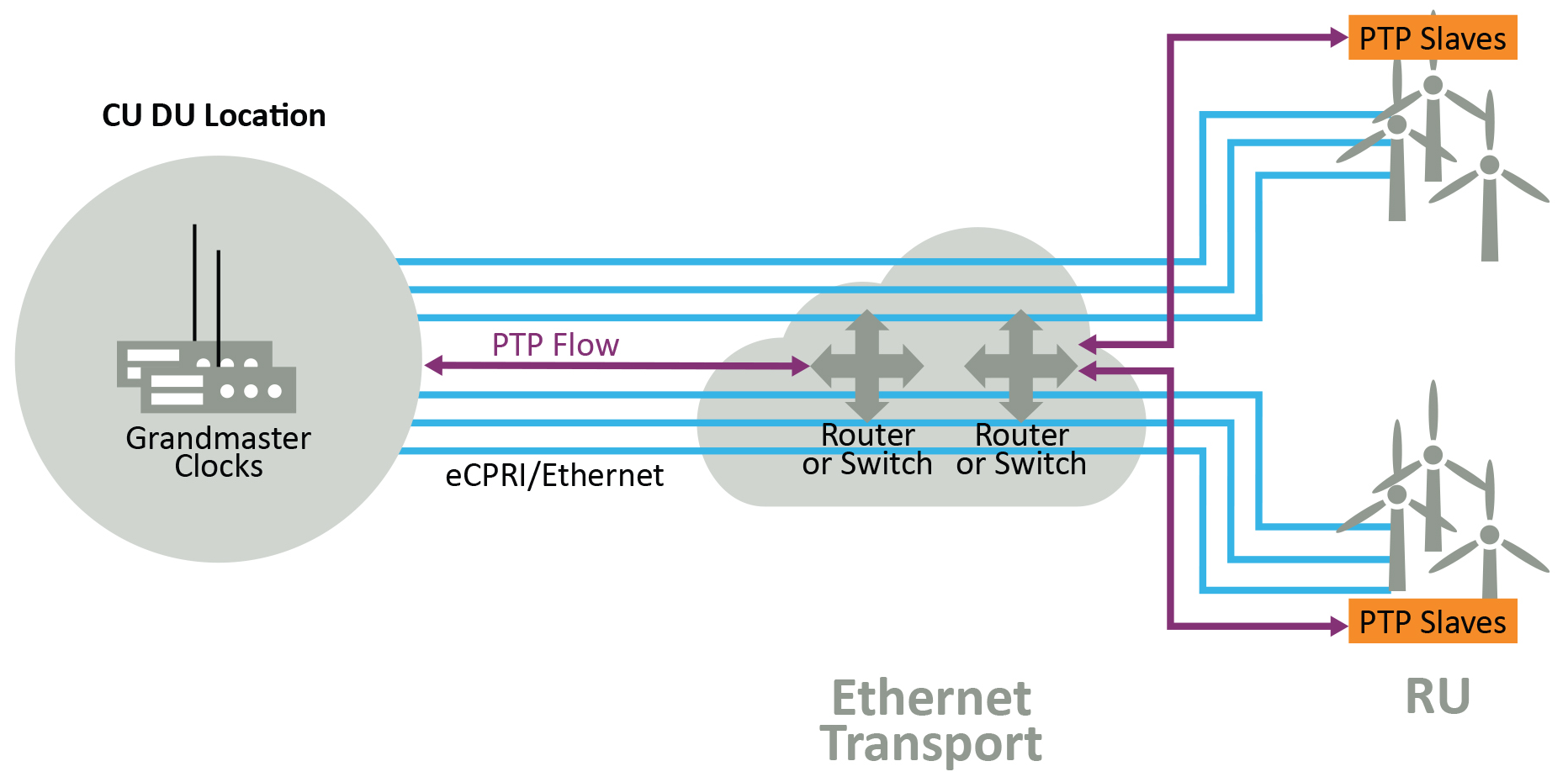
Figure 3. A PTP grandmaster clock provides time transfer using the PTP protocol directly to PTP Slaves in the 5G radios.
The BBU is being disaggregated into two component functions, the Distributed Unit and the Centralized Unit, both of which can be virtualized, with CPRI based timing being moved to PTP over Ethernet directly into the Radios. This will drive a huge change in timing architectures: GPS will necessarily move to aggregation points for clusters of Radios and PTP will become ubiquitous throughout the network. Such an architecture will require robust and resilient GPS deployment deeper in the network and more PTP to provide both timing to the 5G Radio Units (RU) and systematic backup and protection for the GPS clocks.
Summary
5G introduces some significant changes that cover almost every aspect of the mobile wireless network architecture including RF frequencies used, the transport of radio I/Q data, the transport architecture, and how the network is synchronized. The reliance on GPS, seen in 3G and 4G systems, is shifting to PTP because of new security and reliability concerns, the need for extremely tight guaranteed timing to 5G radios without Line of Sight to satellite systems, and operator preference for guaranteed phase alignment and control of critical timing services.
More deterministic and more stringent timing enabling the always-on ubiquitous wideband services will be the hallmark of 5G networks.
 Jim Olsen is a solutions architect for with Microchip Technology. He has extensive experience in designing and implementing network synchronization and timing architectures in more than 50 countries. Jim first joined the company in 1984 and has served in a wide range of roles in Service, Sales, and Marketing. In 2000, he started a position in Advanced Technologies helping identify new technologies and investment opportunities. Jim speaks regularly at industry seminars and events and his numerous articles and whitepapers on synchronization and timing have appeared in books and trade publications.
Jim Olsen is a solutions architect for with Microchip Technology. He has extensive experience in designing and implementing network synchronization and timing architectures in more than 50 countries. Jim first joined the company in 1984 and has served in a wide range of roles in Service, Sales, and Marketing. In 2000, he started a position in Advanced Technologies helping identify new technologies and investment opportunities. Jim speaks regularly at industry seminars and events and his numerous articles and whitepapers on synchronization and timing have appeared in books and trade publications.
Related articles
- IEEE 1588 adds timing performance while reducing cost and risk
- 5G fronthaul networks add flexibility
- Grandmaster clock gets enhancements