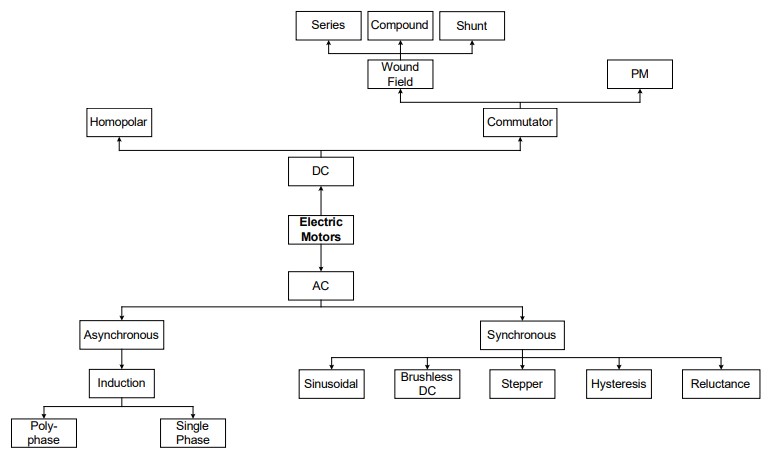
Motors use the principles of electromagnetism to convert electrical energy into mechanical energy. There are a wide variety of electrical configurations and mechanical constructions used to produce electric motors. A fundamental difference between various types of motors is whether the input voltage is AC or DC. However, that differentiation immediately becomes a little fuzzy since brushless DC (BLDC) motors are sometimes classified as a type of AC motor (see chart below).
Wikipedia defines a “DC motor is any of a class of rotary electrical motors that converts direct current electrical energy into mechanical energy.” By that definition, a BLDC motor should be classified as a DC motor. However, looking at the motor construction instead of the input voltage can support classifying BLDCs as AC motors. The reason for classifying BLDCs as a type of AC motor is that, even though they operate with a DC input voltage, BLDCs are very similar in construction to AC synchronous motors (the similarities between BLDC and AC synchronous motors are discussed in more detail toward the end of this FAQ).
Basics of DC motors
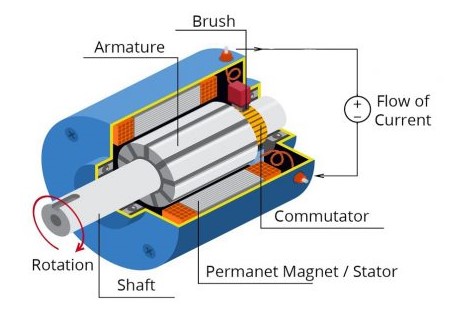
Before getting into the similarities and differences between BLDC and AC Synchronous motors, it can be useful to review some fundamental elements of DC motor construction:
- Armature, the rotating part of the motor (sometimes called the rotor)
- Stator, the field windings or the stationary part of the motor
- Commutator is an electrical switch that periodically reverses the current direction between the rotor and the external circuit; it can be brushed or brushless. (In the diagram above, Commutator refers to brushed motors)
- Field magnets provide the magnetic field that turns an axel connected to the motor; it can be a permanent magnet or an electromagnet
DC motors are designed with various brush grades optimized for specific environments based on operating temperature, humidity, mechanical stress, and other factors. Graphite brushes last for a period of three months to three years, based on the motor unit and the service conditions. In some cases, materials are added to the graphite to optimize the brushes for specific operating requirements. And some brushes are made from copper or other metals. Selection of each motor design’s correct brush material is important to avoid commutator damage and optimize motor reliability.
Homopolar DC motors
Homopolar motors are a type of brushed motor that does not have a commutator. The name homopolar comes from the fact that the conductor’s electrical polarity and the magnetic field poles do not change (therefore, it does not need commutation). While a homopolar motor does not have a commutator, it still requires slip rings to transmit power to the rotor. A slip ring is a stationary graphite or metal contact (brush) which rubs on the outside diameter of a rotating metal ring. As the metal ring turns, the electric current is conducted through the stationary brush to the metal ring, making the connection.
Homopolar motors are simple in construction and are often found in small toys, classrooms, and science fairs. Homopolar technology mostly finds commercial applications in generators rather than motors. Typical applications include electroplating plants where they operate at low voltages. Homopolar generators have also been used in high-torque wind turbines. These generators’ mechanics can provide a low-cost means of converting wind into electricity because of the reduced need for complex gears. They also require less maintenance than other types of generators.
Permanent magnet commutator motors
Commutator motors feature either permanent magnets or wound magnets. Until recently, the lack of permanent magnets with high-strength fields limited permanent-magnet designs to use in fractional horsepower motors; they are small, light, efficient, and reliable. High-intensity permanent magnets, such as neodymium magnets, have enabled the development of compact, high-power permanent magnet motors without the extra volume of field coils and excitation means.
Wound commutator DC motors
The field coils have traditionally existed in four basic formats: separately excited (sepex), series-wound, shunt-wound, and a combination of series and shunt called compound-wound.
In a sepex DC motor, the supply is given separately to the field and armature windings. The armature current does not flow through the field windings. In the series-wound, shunt-wound, and compound-wound motors, the armature current and field currents are from the same supply. In a sepex motor, the field coils are supplied from an independent source, and the field current is unaffected by changes in the armature current, providing another level of control. The sepex system can be used in DC traction motors to enable control of wheelslip.
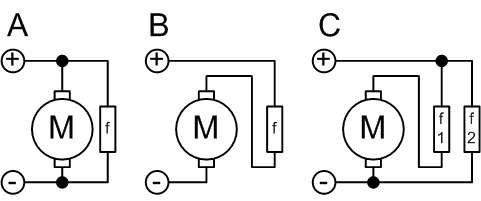
In a shunt-wound motor, the field coils are connected in parallel or “shunted” to the armature coils. As a result of the parallel operation, the windings receive the same supply voltage. Shunt motors usually have more turns on the windings compared with series motors. Shunt motors have very good speed control, even under varying loads, but they do not have the high starting torque of series-wound motors.
In shunt DC motors, the current is larger in the armature compared with the field coil. The larger armature current produces an electromotive force (EMF) caused by the armature’s magnetic field rotating through the stator field. That force is called back EMF. Back EMF is proportional to speed. As the motor speed increases, the back EMF increases, and the back EMF decreases as the rotation slows. As a result, shunt DC motors have some ability to self-regulate their speed.
Shunt DC motors are found in grinding machines and lathes where good speed regulation is needed with varying loads. Processes that require constant tension, such as winding and printing, also use shunt DC motors. The ease of using these motors enables their application in power windows and windshield wipers in cars and cooling fans for electronic systems.
In a series-wound motor, the field coils are connected electrically in series with the armature coils (via the brushes). In a shunt-wound design, the field coils and the armature coils see the same supply voltage. In a series-wound design, the field coils and armature coils receive the same current. This typically results in higher currents in the field windings compared with a shunt design. As a result, the windings tend to be thicker and fewer in number in series-wound motors. The higher current in the field coils results in high torque.
The high starting torque and non-linear speed capabilities of series-wound DC motors can be used with large machines, such as cranes and winches, which can move heavy loads slowly and lighter loads more rapidly. These motors’ variable speed capabilities allow them to be used in a range of sizes and applications such as vacuum cleaners, sewing machines, power tools, traction systems, elevators, and so on.
A compound wound DC motor combines the structure of both a series-wound and a shunt-wound motor. Compound motors provide a compromise between series and shunt designs with a good combination of speed regulation and starting torque. As a result, compound wound DC motors can be found in a wide range of applications, from business machines to machine tools and heavy equipment.
Motors that can be classified as AC or DC
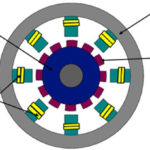
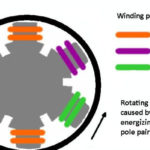
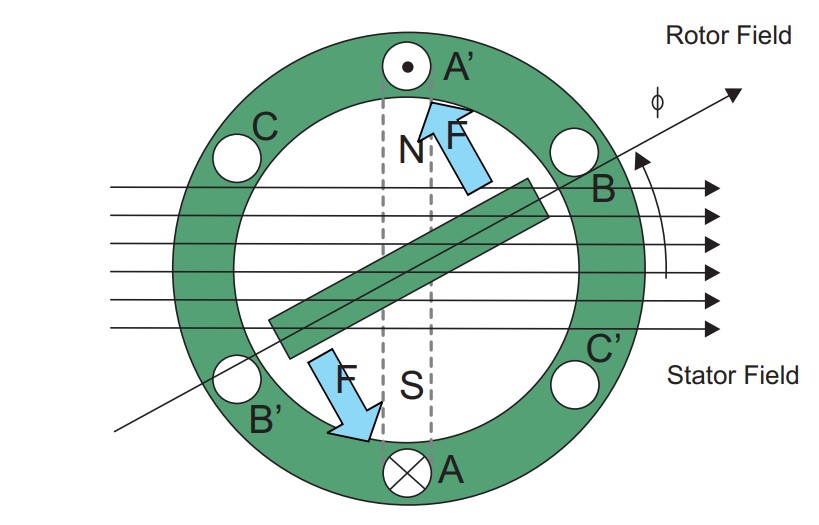
BLDC and synchronous AC motors are both brushless and rely on electronics for commutation. And both are synchronous with rotor and stator magnetic fields that rotate at the same frequency, in synchronization. BLDC and synchronous AC motors have permanent magnets on the rotor. The rotor permanent magnets create a rotor flux, and current supplied to the stator windings creates electromagnetic poles.
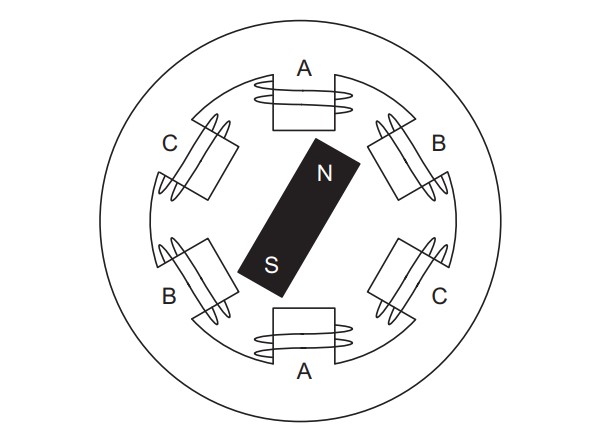
BLDC motors and synchronous AC motors are similar in construction. The difference is in the structure of the stator windings, which results in differing back EMF characteristics for each motor. In BLDC motors, the stator coils are wound trapezoidal, and the back EMF produced has a trapezoidal waveform. In contrast, synchronous AC motors are wound sinusoidally and produce a sinusoidal back-EMF.
The type of drive current also affects the amount of noise that the motor produces. The trapezoidal drive current used by BLDC motors tends to produce a greater amount of audible and electrical noise compared to sinusoidally driven synchronous AC motors. Because their commutation is continuous, synchronous AC motors can operate without the torque ripple found in BLDC motors. Sinusoidal commutation, however, requires more complex control algorithms than trapezoidal commutation.
A stepper motor is a specialized BLDC motor that divides a full rotation into a number of equal steps. The motor’s position can then be commanded to move and hold at one of these steps without any position sensor for feedback (an open-loop controller).
Motors that can operate from AC or DC
The universal motor is a variation on a series-wound DC motor that can operate from either AC or DC power. Universal motors have high starting torque, can run at high speed, and are lightweight and compact. They are commonly used in portable power tools and equipment, as well as many household appliances. They’re relatively easy to control, but these motors have brushes that wear, so they are much less often used for equipment that is in continuous use. Universal motors are acoustically and electromagnetically noisy.
The next article in this FAQ series will look into driving various types of DC motors. The final two FAQs will consider AC motors and AC motor drives.
References:
Brushed DC electric motor, Wikipedia
Brushless DC electric motor, Wikipedia
Brushless DC motor fundamentals, Monolithic Power Systems
Motor handbook, Infineon Technologies
Sensored Field Oriented Control of 3-Phase Permanent Magnet Synchronous Motors Using TMS320F2837x, Texas Instruments