Vehicle dynamics play an important role in validating intelligent systems.
Michael Peperhowe, dSpace gmbh
Advanced driver assistance systems and autonomous driving (ADAS/AD) functions are designed to make everyone on the road more safe. Design engineers have long validated these functions by simulating them in test scenarios involving other vehicles, pedestrians, and obstacles. But it is increasingly understood that the dynamic behavior of the vehicle itself plays an huge role in the operation of safety functions.
Physically, vehicles are more than a point mass, and their dynamic driving behavior has a particular influence on critical driving situations. Consider a simple example of braking on surfaces with different friction coefficients: The vehicle starts skidding as torque is generated around its vertical axis. Even if stability systems intervene to prevent rotation, safety aspects must always be evaluated from the perspective of data coming in from sensors. But a question to ask is how dynamic driving effects influence the sensor output and imaging sensor output in particular. And how do functions for ADAS/AD (advanced driver assistance systems/autonomous driving) use this information?
You don’t have to perform any elaborate and dangerous maneuvers on the proving grounds to investigate the vehicle’s dynamic behavior. With just a few clicks, simulations deliver revealing insights. To illustrate, we will look at selected relevant situations using the dSPACE tool suite Automotive Simulation Models (ASM) combined with the sensor-realistic simulation software Aurelion.
Emergency braking at the limit
A semi tractor-trailer truck serves as a test vehicle for emergency braking at the limit on roads having different friction coefficients. The different friction coefficients might arise due to leaves, rain, snow, and so forth. The electronic brake system (EBS) is switched off to highlight how vehicle dynamics influences the overall system behavior.

As the truck approaches an obstacle, the braking process is triggered by the automatic emergency braking (AEB) system, a part of an ADAS, based on its assessment of collision risk.
Two insights emerge from this simulation: First, with full braking at an ideal friction value, the truck stops completely well before the stationary obstacle. The truck and trailer remain in their own lane. Second, with full braking with a lower coefficient of friction, a much more critical situation arises. The lower coefficient of friction lengthens the braking distance and completely changes the movement of the truck-trailer combination. The truck protrudes into the oncoming lane.
The examples show that simulation can realistically represent emergency braking only if all physical aspects of driving are taken into account (in this case friction values and jack-knifing between the truck and trailer). And the function of the ADAS can only be fully evaluated and validated by considering the effects of vehicle dynamics. The stability of the overall system must not be disregarded, especially when deciding on emergency braking at the limits of vehicle dynamics.
In addition, the ASM vehicle models also take into account how the braking system, both hydraulic and pneumatic, behaves. Thus these models offer the possibility of testing an ADAS/AD ECU in conjunction with other ECUs to assess, for example, how ECUs interact with an electronic stability controller (ESC). The benefit: The evaluation and validation covers the performance of the entire system, not just a single component. This system view gives ADAS/AD developers more options for understanding and adjusting the system behavior at an early stage.
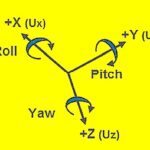
Pitch angle
When a tractor-trailer truck brakes, the accelerations in the direction of travel cause the driver cabin to pitch toward the chassis. This forces the camera sensors installed in the driver cabin to change their angle of view. The installed ADAS/AD control units compensate for this change in view so the distance to the detected obstacle is calculated correctly.

During hard braking, the pitch angle changes the view of the detected obstacle for a camera mounted in the cab of a tractor-trailer truck. A strong pitch angle even leads to the obstacle only being partially within the FoV of the sensor, which results in a more difficult object detection/perception.
The pitch angle compensation must as well be part of the simulation. Compensation is essential for both object detection by individual sensors and for downstream sensor fusion. For example, a camera sensor installed in the cabin must see an obstacle in the same position as the radar sensor installed at the bottom of the chassis. Otherwise, there is a risk the entire system could fail, with potentially serious consequences.
Depending on the situation, a detected obstacle can disappear partially or even completely from the sensor’s field of view (FoV), especially in the presence of strong braking decelerations and the resulting high pitch angle. The behavior of the ADAS/AD in these particularly critical situations must be known and validated.
This physical behavior can be clearly displayed with ASM Truck and correctly integrated into the simulation. The physics-based sensor models in Aurelion let you freely configure the sensor position as, for example, the location of the camera sensor in the cabin with additional degrees of freedom.
One important function of ADAS/AD control units for semi-trucks is active lane keeping assistants (LKA). They must not only detect the road correctly but also function properly despite external disturbances. Such disturbances can arise, for example, when the vehicle is in a rut or lane groove and must counter steer. For reliable validation of the LKA system, it is therefore necessary to be able to realistically represent such disturbance variables in a closed-loop simulation.
With the ASM Road simulation model, any road surface can be simulated and flexibly parameterized. This gives you very broad test coverage with reproducible tests that are impractical in real test drives.
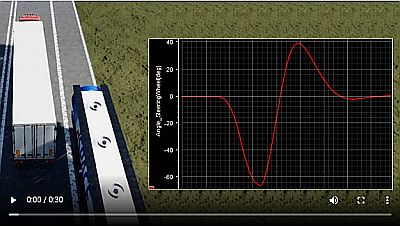
A crosswind simulation as might arise when a tractor-trailer truck passes a bus.
Another aspect that is particularly important for trucks is the effect of crosswinds on automated lane keeping. High lateral wind gusts can impinge on trucks as they pass obstacles and other semi tractor trailers. The gusts can push hard enough on vehicles with trailers and semi-trailers to cause instabilities. The ADAS/AD control unit must recognize these and respond appropriately.
Again, ASM simulation can replicate a wide variety of such situations. This allows designers to create algorithms having a high level of maturity at an early stage. Last but not least, these tests are essential for validating the control units.
The inclusion of highly accurate vehicle dynamic system behavior makes it possible to simulate the influence of physical effects on ADAS/AD systems and to use them productively for validation. In this way, vehicle dynamics simulation makes an essential contribution to reliable development and validation and ensures that ADAS/AD ECUs are robust.
When there are fatal consequences during critical driving situations, the cause can often be traced back to the interaction of different effects. The precise combination of these effects often cannot be duplicated on a test track, but are possible in the simulation. Realistic traffic and vehicle dynamics simulations provide a foundation for the efficient development of ADAS/AD systems. Simulations improve both test depth and test breadth which, in turn, boost the quality of the individual safety functions and the way they interact with the overall system.
Note: All simulations shown were performed with the dSpace multi-physics tool suite ASM (automotive simulation models). The sensor simulations and animations were calculated and rendered using the high-fidelity 3D software Aurelion.